This is an old revision of the document!
Table of Contents
![]()
MuPIF
MuPIF is open-source, modular, object-oriented integration platform allowing to create complex, distributed, multiphysics simulation workflows across the scales and processing chains by combining existing simulation tools. MuPIF is written in Python 3.5 and is independent on operating system.
MuPIF utilizes an object-oriented approach, with abstract classes defining standardized interfaces introduced to represent simulation models and data types. This concept allows to manipulate and steer all models using generic interface. It will also allow to abstract from a particular internal data representation of a data type, including storage and location. In turn, the models working with the data obtain required information from data objects using services, rather than obtaining them by interpreting raw data (which yields the data format dependence). One can think of abstract classes as representing data as “data bricks” with standardized connectors able to be used in their appropriate place in workflows to represent abstract data containers. MuPIF achieves interoperability with standardization of application and data component interfaces and it is not reliant on standardized data structures or protocols. Any existing data representation or simulation model can be plugged in and used transparently, provided the corresponding data interface is implemented.
Even though the platform can be used locally on a single computer orchestrating installed applications, the real strength of the MuPIF platform is its distributed design, allowing to execute simulation scenarios involving remote applications and data. MuPIF provides a transparent distributed object system, which takes care of the network communication between the objects when they are distributed over different machines on the network.
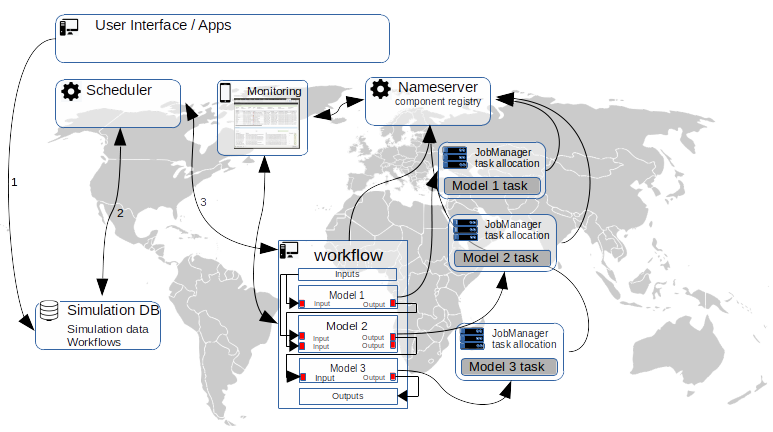
The simulation workflows are implemented as Python scripts built on top of MuPIF. The graphical workflow editor is available to make the workflow implementation more accessible and convenient.
MuPIF comes with a Data Management System (DMS) called MuPIFDB. The DMS is used to track integrated simulation workflows, their executions including execution inputs and outputs. It also provides a generic Digital Twin model, which is based on the user-defined Entity Data Model (EDM). The EDM identifies the individual entities, their attributes and relations between them. The EDM is defined using JSON schema, and the DMS structure is generated from this schema. When designing the EDM, one should introduce Entities and their States, following the EMMO Reductionistic perspective. The EDM allows to map State attributes to simulation workflow inputs (determining the initial conditions) and simulation workflow outputs can be mapped to new State representing updated configuration(s). The EDM can thus be regarded as hypergraph, where nodes represent entity states and edges representing processes.
MuPIF highlights
- Design based on interacting, distributed components (objects), representing simulation models, workflows, and data (such as properties, spatial fields, microstructures, etc.)
- Instead of trying to standardize data structures, MuPIF is focused on identification and standardization of component services
- Data, metadata and services (algorithms) operating on data encapsulated in a component are exchanged between applications → Models will get data and operations on data in one consistent package, do not have to interpret data themselves
- MuPIF components can be local as well as remote objects → distributed workflows, distributed data, enabling business model based on software or data as service and marketplaces integration
- MuPIF supports SSL or VPN based secure communication and data exchange
- Interfacing to commercial, closed source as well as open source simulation tools and databases.
- MuPIF comes with own database solution (MuPIFDB) to track and store simulations and workflow scheduler. Both tools come with REST API allowing easy integration
- Graphical workflow editor
Documentation & Resources
- The Musicode project MuPIF training video recording is available on YouTube: Musicode MuPIF training.
- The mupif/jupyter-demos repository on GitHub contains
- Online User manual and Reference manual
- Workflow Editor and Code Generator A graphical tool to compose a workflow structure and generate a Python code of the simulation.
- Examples
How to get MuPIF
The easiest installation happens through Python Package Index (pip) which takes care of dependencies and installs/updates missing modules automatically. Run as a command
pip3 install --upgrade git+https://github.com/mupif/mupif.git
Alternatively, you may download and install MuPIF from MuPIF git repository
git clone https://github.com/mupif/mupif.git
License
MuPIF is available under GNU Library or Lesser General Public License version 3.0 (LGPLv3)
Support
The GitHub issue subsystem to report any bugs or get a support MuPIF GitHub page
Authors & Credits
Mupif developpers:
- Bořek Patzák (Lead Developper)
- Václav Šmilauer
- Martin Horák
- Stanislav Šulc
- Former developpers: Daniel Rypl, Jaroslav Kruis, Guillaume Pacquaut
Contact: Borek.Patzak(at)cvut.cz
Related Publications
- B. Patzák, D. Rypl, and J. Kruis. Mupif – a distributed multi-physics integration tool. Advances in Engineering Software, 60–61(0):89 – 97, 2013 (http://www.sciencedirect.com/science/article/pii/S0965997812001329).
- B. Patzák. Design of a multi-physics integration tool. In B. H. V. Topping, J. M. Adam, F. J. Pallares, R. Bru, and M. L. Romero, editors, Proceedings of the Seventh International Conference on Engineering Computational Technology, Stirlingshire, United Kingdom, 2010. Civil-Comp Press. paper 127.
- B. Patzak, V. Smilauer, and G. Pacquaut, presentation & paper “Design of a Multiscale Modelling Platform” at the 15 th International Conference on Civil, Structural, and Environmental Engineering Computing, 1st - 4th of September 2015, Prague (Czech Republic).
- B. Patzák, V. Šmilauer, M. Apel, R. Altenfeld, L. Thielen, A. Lankhorst, Multi-Physics Integration Framework MuPIF – design, operation and application to simulate CIGS thin film growth for photovoltaics, 2nd International Workshop on Software Solutions for ICME, April 2016, Barcelona, Spain.
- B. Patzák, V. Šmilauer and M. Horák. MuPIF: Multi-Physics Integration Platform. 6th European Conference on Computational Mechanics (ECCM 6), Glasgow, 2018.
- S. Belouettar, C. Kavka, B. Patzák, H. Koelman, G. Rauchs, G. Giunta, A. Madeo, S. Pricl, S. et al. Integration of material and process modelling in a business decision support system: Case of COMPOSELECTOR H2020 project. Composite Structures, 204, 778-790, 2018.
Projects using MuPIF
- MuPIF spotted by EU Innovation Radar as innovation exploring value creation opportunities https://www.innoradar.eu/innovation/35416
- MuPIF used as modeling platform in H2020 Composelector and Musicode projects
- Platform is used to simulate the effect of fire on structural response, project GACR 16-18448S
- Platform has been used to model moisture condensation in tunnels, project CESTI
- MuPIF has been used to simulate CIGS selenization and Light conversion in LEDs in EU FP7 MMP project.
Events
- Ioannina Summer School on Multiscale Modelling and Open Innovation Platforms, 18-23 July 2022, Ioannina, Greece (online event), http://musicode.eu/events/summer-schools/2022
Course
We offer intensive, one-day course on multi-scale and multi-physics modeling using MuPIF platform. The course covers following topics:
- Fundamentals of MuPIF philosophy, design, and structure
- MuPIF installaton on different platforms
- Application interface explained, connecting existing applications
- Developping custom simulation scenarios
- Practical session on platform usage
Acknowledgements
- The original development of MuPIF has been funded by Grant Agency of the Czech Republic - Project No. P105/10/1402.
- The development has been supported by several EU project:
- MMP - Multiscale Modelling Platform: Smart design of nano-enabled products in green technologies (FP7 project number 604279),
At present, the MuPIF development is supported by following projects
- DeeMa project (Deep-Learning and Optimisation Enabled Material Microstructure Design), funded by Technology Agency of the Czech Republic, grant agreement no. TH75020002.
Access counter:
(Since May, 2016)